Coordinating Autonomous Mobile Robots with Conveyor Infrastructure

As warehouses and manufacturing environments scale automation, the integration of Autonomous Mobile Robots (AMRs) with conveyor systems has become essential. Instead of functioning independently, these technologies must operate in sync to maintain seamless material movement, eliminate bottlenecks, and improve overall efficiency. When properly coordinated, mobile robotics and fixed conveyor infrastructure create faster, more flexible, and highly scalable logistics operations.
Step 1: Understanding the Role of AMRs and Conveyors 🤖📦
• AMRs enable flexible and adaptive transport across facility layouts 🔄🚚
• Conveyors support continuous, high-volume movement of goods 📦➡️
• AMRs manage variability, while conveyors handle repetitive flows ⚖️🔁
• Both systems complement each other in hybrid automation setups 🤝⚙️
• Integration builds a balanced and efficient material handling environment 🌐📊
Step 2: Designing a Unified Material Flow Strategy 🧭📐
• Align AMR pathways with conveyor loading and unloading points 🔗📍
• Define clear transfer zones between mobile and fixed systems 🔄📦
• Optimize facility layout to reduce travel time and congestion ⏱️🚫
• Ensure smooth flow between dynamic and static infrastructure 🔁⚙️
• Plan for scalability as operational complexity grows 📈🏗️
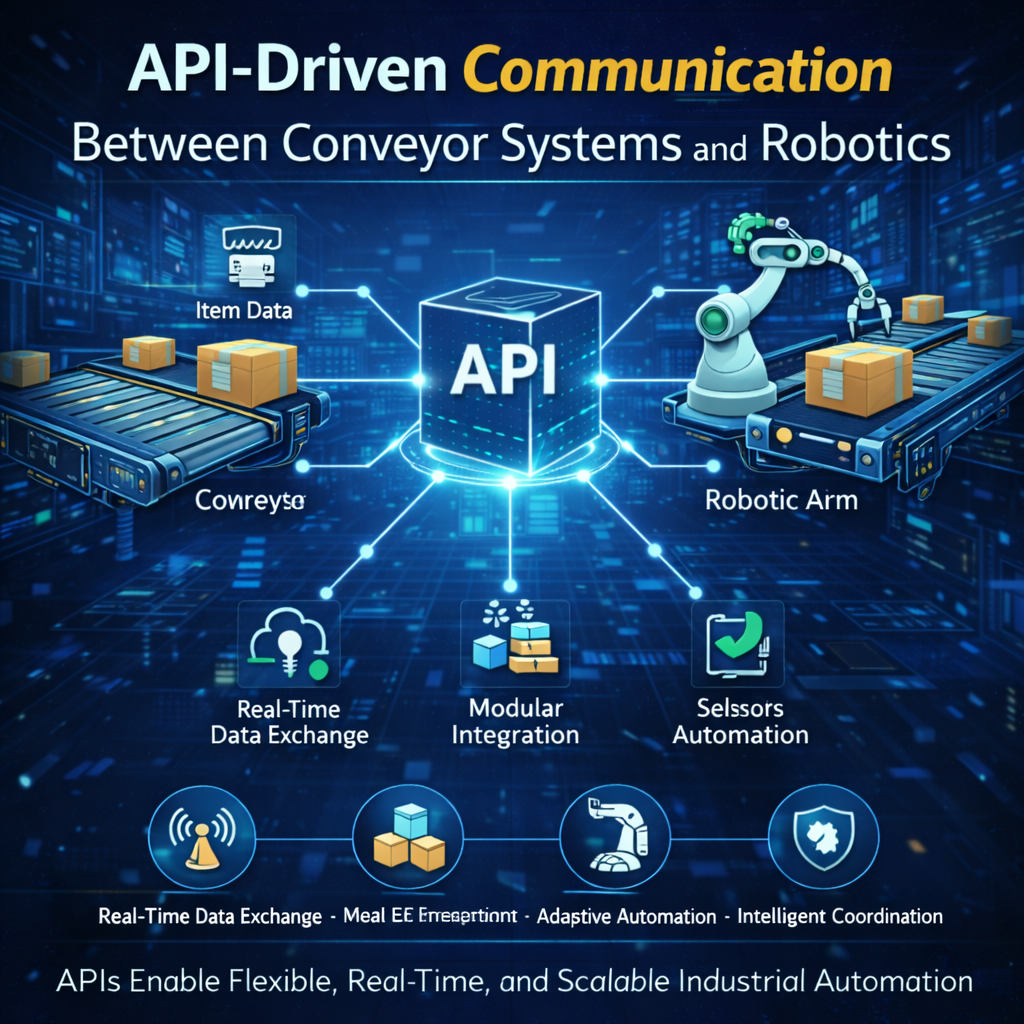
Step 3: Synchronizing System Communication 🔗🧠
• Enable real-time communication between AMRs and conveyor controls 📡⚙️
• Use orchestration platforms or middleware for coordination 🧩💻
• Share data such as location, task status, and availability 📊📍
• Support event-driven triggers for routing and handoffs ⚡🔄
• Maintain low-latency communication for responsive operations ⏱️📶
Step 4: Managing Handoff Points Efficiently 🔄📦
• Design buffer zones to handle timing differences between systems ⏳📥
• Standardize transfer mechanisms for consistent handoffs ⚙️📤
• Avoid congestion and delays at integration points 🚫🚦
• Monitor queue levels and system readiness in real time 👀📊
• Ensure smooth transitions between mobile robots and conveyors 🔁🤝
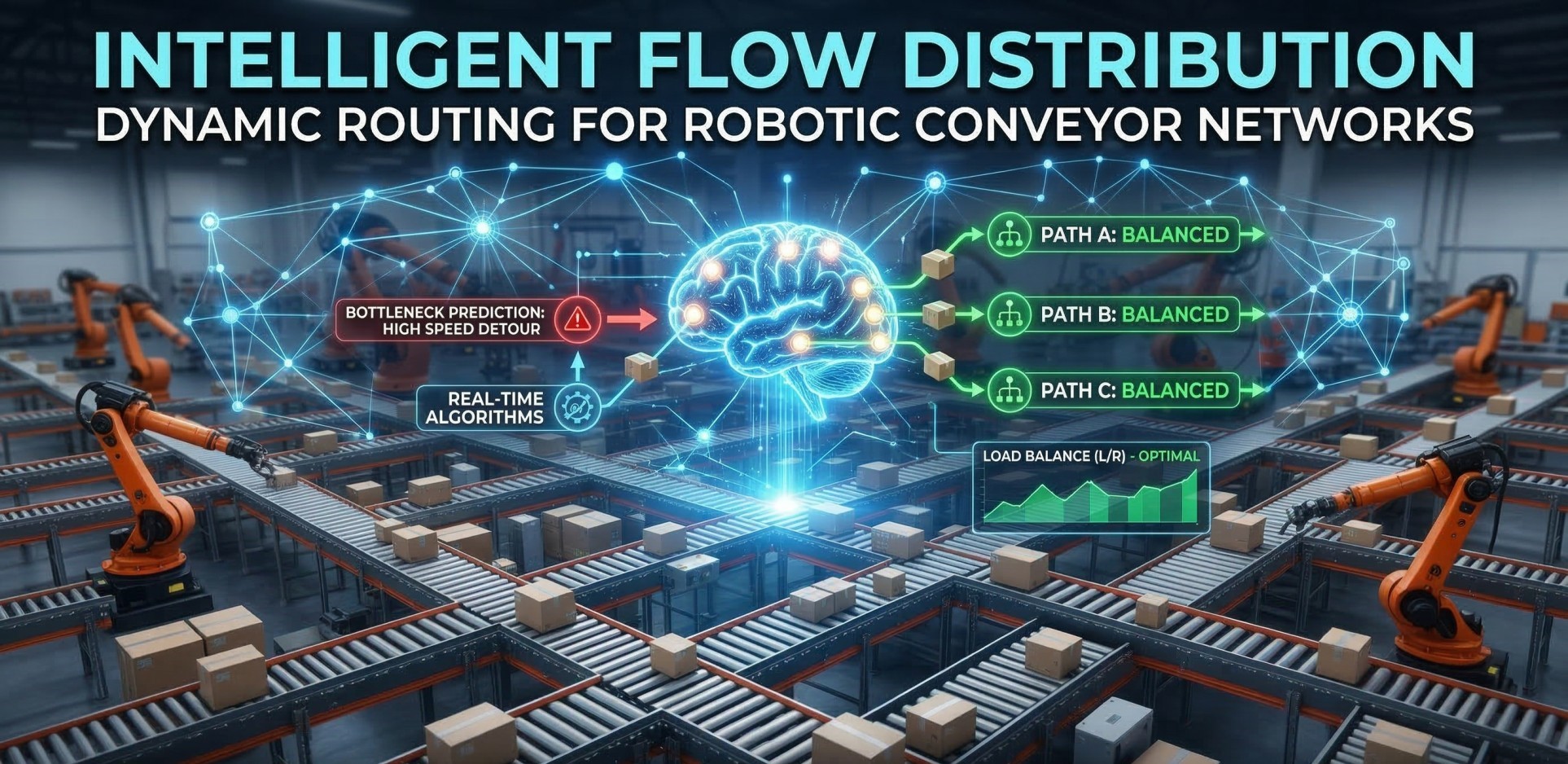
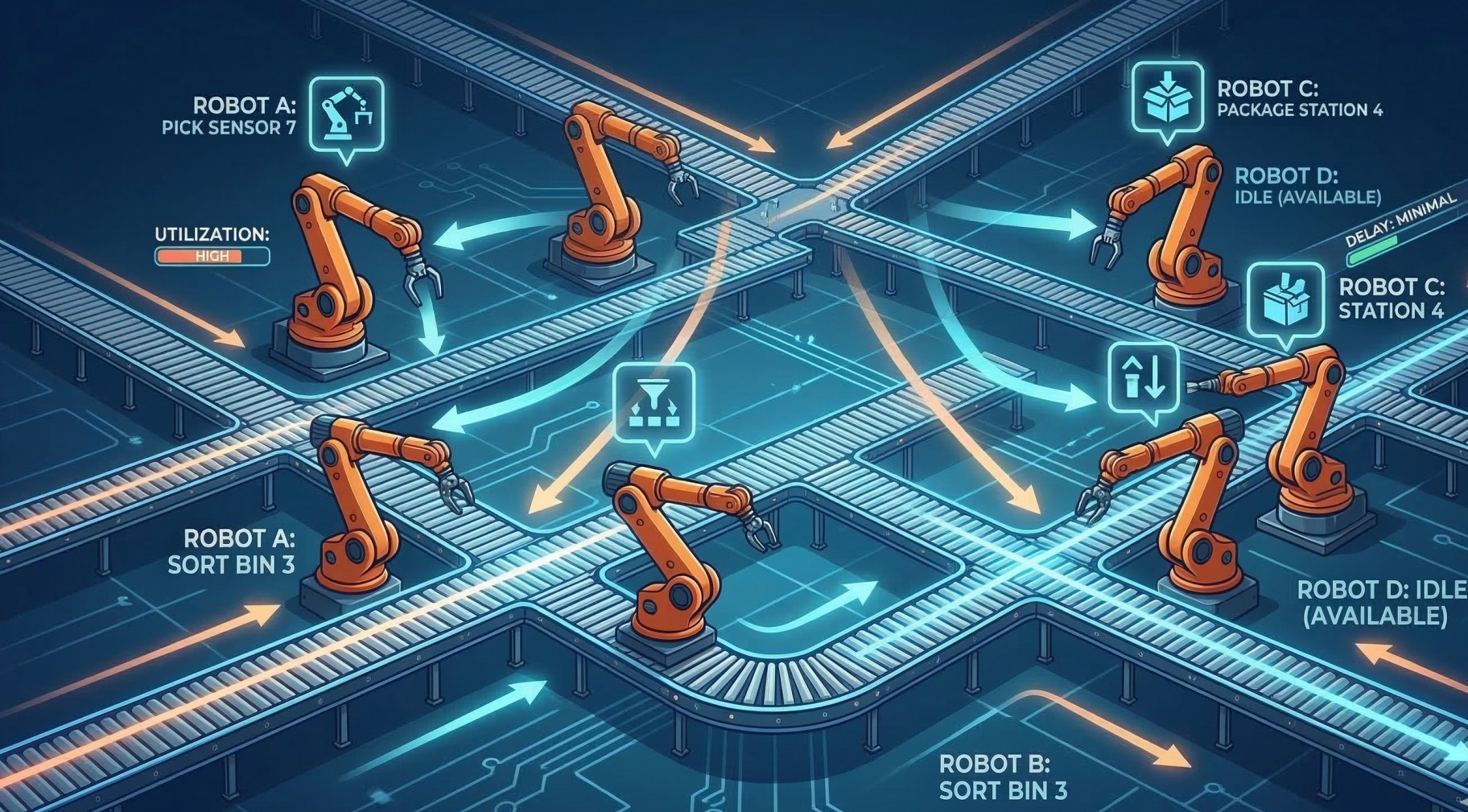
Step 5: Dynamic Routing and Task Allocation 🗺️⚡
• Assign AMR tasks based on real-time operational conditions 📊🤖
• Reroute robots to avoid congestion near conveyor interfaces 🚫📍
• Prioritize urgent deliveries and time-sensitive tasks ⏱️🎯
• Distribute workload evenly across available robots ⚖️🔄
• Continuously adapt to changing demand and system states 🔁📈
Step 6: Ensuring Safety and Collision Avoidance 🛡️🚧
• Apply safety protocols across shared operational areas ⚠️📏
• Coordinate AMR movement with conveyor activity zones 🔄⚙️
• Use sensors and control systems to prevent interference 👀🧠
• Define clear interaction rules and boundaries 🚧📍
• Ensure compliance with industrial safety regulations 🏭✔️
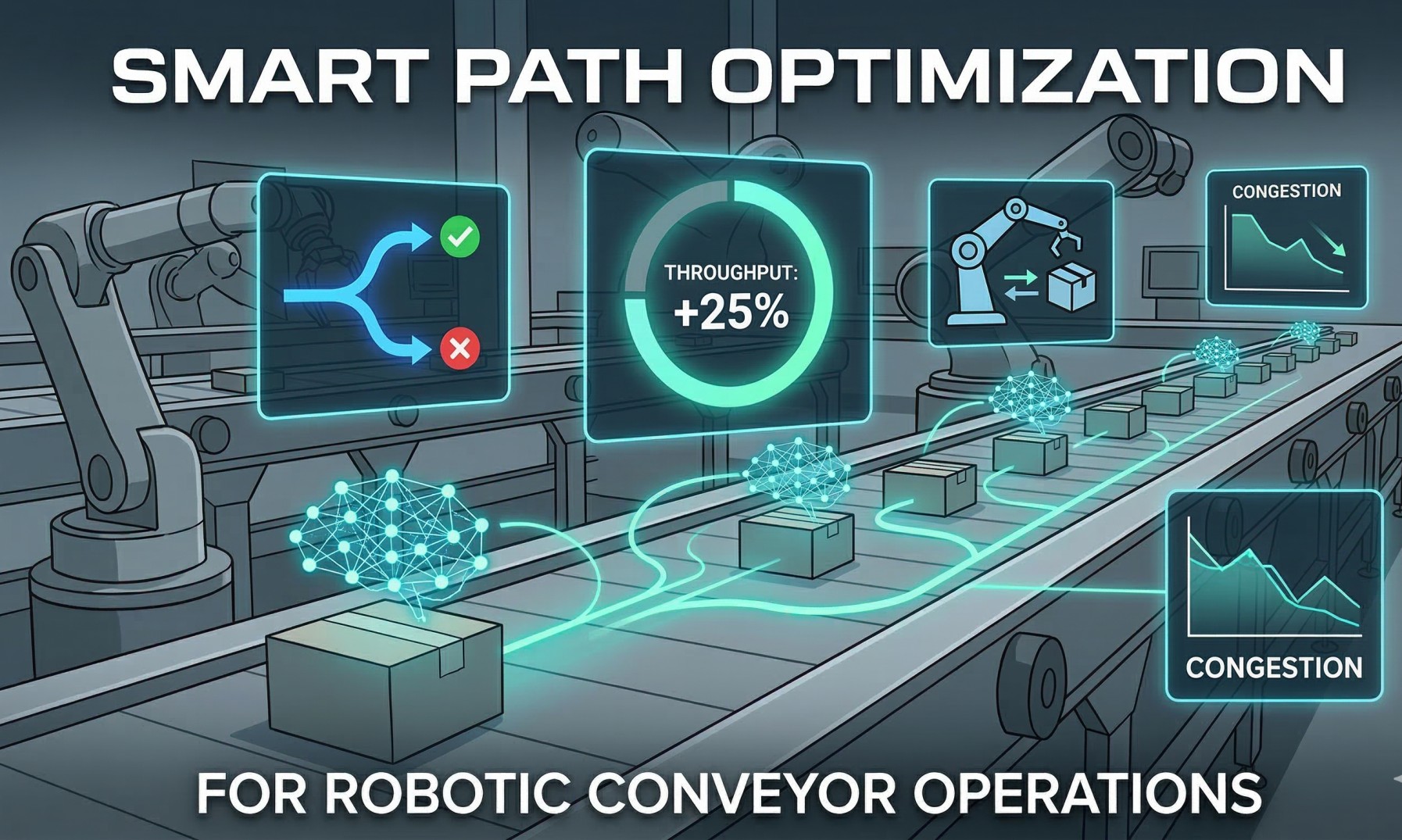
Step 7: Monitoring and Performance Optimization 📊⚙️
• Track throughput across AMRs and conveyor systems 📈📦
• Identify bottlenecks at system integration points 🔍🚫
• Analyze utilization rates and idle times 🕒📊
• Optimize flow rates and task distribution 🔄⚡
• Continuously refine coordination strategies for efficiency 🧠📈
Step 8: Key Integration Priorities 🎯🔗
• Ensure seamless coordination between robots and conveyors 🤝⚙️
• Maintain real-time visibility into system status and flow 👀📊
• Build reliable and efficient transfer mechanisms 🔄📦
• Design scalable systems for future expansion 📈🏗️
Step 9: Handling Exceptions and System Variability ⚠️🔄
• Detect and resolve disruptions such as delays or blockages 🚨📦
• Reroute AMRs when conveyor paths are unavailable 🔁🚧
• Implement fallback processes for system interruptions 🛠️📉
• Maintain performance during peak demand periods 📈⚡
• Enable fast recovery from unexpected operational issues 🔄🚀
Step 10: Building a Scalable Automation Ecosystem 🏗️🌐
• Design systems that support gradual automation expansion 📈🤖
• Add robots or conveyor lines with minimal disruption 🔄⚙️
• Maintain flexibility for evolving workflows 🔁📋
• Support changing business and operational requirements 🏢📊
• Future-proof infrastructure through modular design 🧩🚀
Conclusion
Coordinating Autonomous Mobile Robots with conveyor infrastructure is a key requirement for efficient and scalable automation in modern logistics environments. By aligning system design, communication, and operational processes, organizations can create a unified material handling ecosystem that combines flexibility with high throughput. Well-integrated solutions not only enhance performance but also enable long-term adaptability in increasingly complex operations.
See more blogs
You can all the articles below