Real-Time Robot Task Allocation in Conveyor Networks
Modern automated warehouses and manufacturing facilities rely on tight coordination between conveyor systems and robotic units. As material flow speeds increase and product variety expands, assigning the right task to the right robot at the right moment becomes critical. Real-time robot task allocation systems ensure that robotic resources are dynamically distributed across conveyor networks, improving efficiency, reducing delays, and maintaining continuous material flow.
Step 1: The Need for Dynamic Task Allocation 🔄
• Conveyor environments operate with constantly changing workloads 📦
• Robots must respond to varying product volumes and routing needs 🤖
• Static task assignment creates bottlenecks during demand spikes ⚠️
• Real-time allocation enables flexible system behavior ⚙️
• Adaptive coordination keeps material flow uninterrupted 🔁
Step 2: Understanding Conveyor Network Complexity 🧩
• Conveyor systems connect multiple processing and transfer points 🔗
• Products may require sorting, picking, inspection, or packaging 📦
• Robots interact with multiple conveyor segments simultaneously 🤖
• Material flow patterns change throughout the production cycle 🔄
• Effective allocation must account for network-wide conditions 🌐
Step 3: Real-Time Data as the Decision Foundation 📊
• Sensors provide continuous updates on conveyor movement and load 📡
• Robots transmit status data such as availability and task progress 🤖
• Control systems track queue lengths and processing delays 📈
• Location and timing data help determine optimal robot assignments 📍
• Continuous data streams enable instant decision updates ⚡
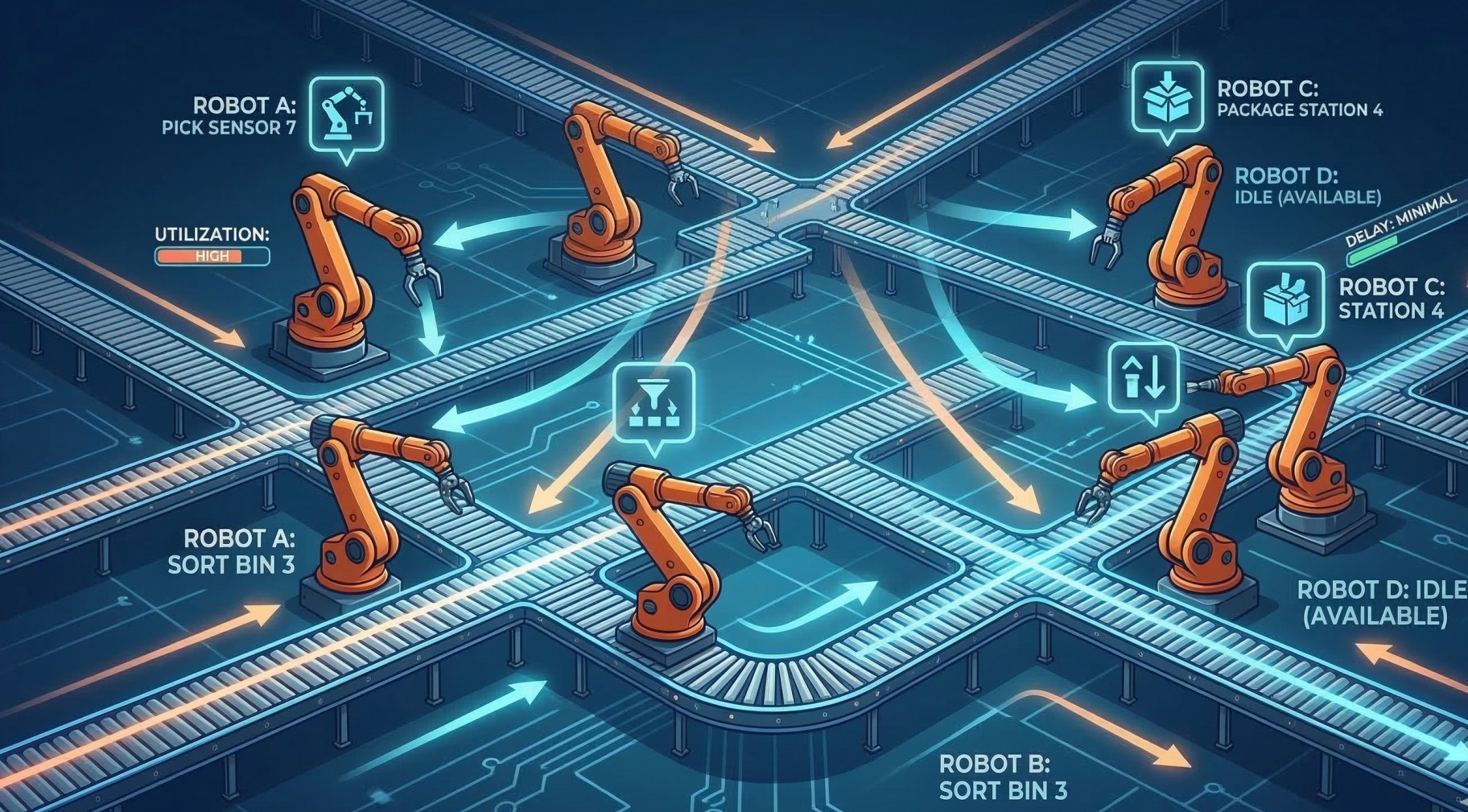
Step 4: Intelligent Task Matching 🎯
• Assigns robots based on proximity to task location 📍
• Considers robot capability and task requirements 🤖
• Prioritizes urgent or time-sensitive operations ⏱️
• Balances workload across available robots ⚖️
• Minimizes idle time and travel distance 🚀
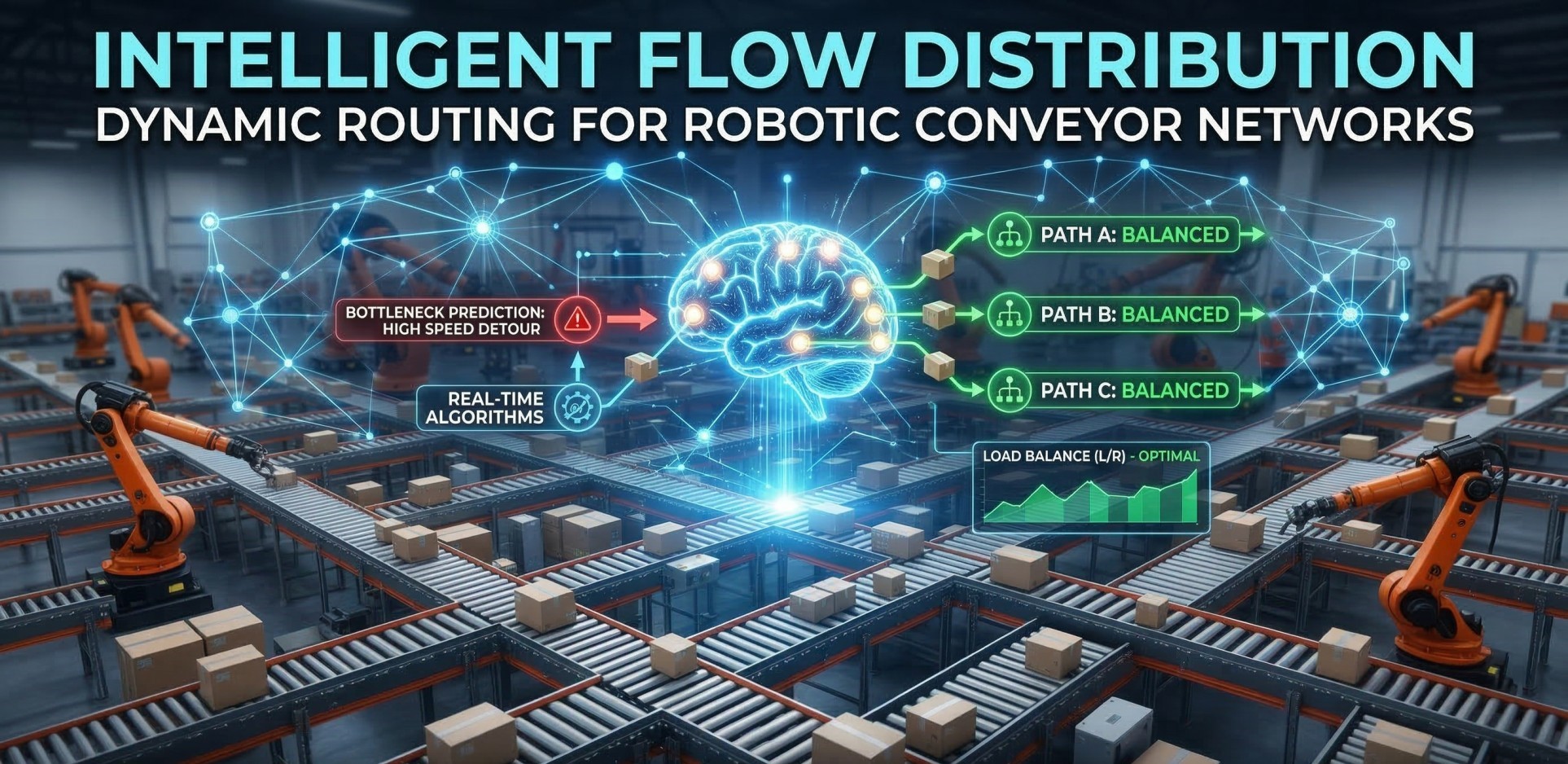
Step 5: Adaptive Scheduling and Resource Optimization ⚙️
• Continuously redistributes tasks as conditions change 🔄
• Prevents congestion at conveyor transfer points 🚧
• Adjusts scheduling when robots complete tasks early or late ⏱️
• Ensures balanced system utilization across the network ⚖️
• Maximizes throughput without overloading specific areas 📈
Step 6: Coordination Between Robots and Conveyor Controllers 🔗
• Synchronizes robotic actions with conveyor timing ⏱️
• Prevents collisions and operational conflicts 🚫
• Enables smooth handoffs between transport stages 🤝
• Maintains stable flow across automated zones 🔄
• Improves reliability of the entire material handling system 🏭
Step 7: Handling Exceptions and Operational Variability ⚠️
• Detects stalled items, jams, or equipment interruptions 🚧
• Redirects robots to alternative tasks when disruptions occur 🔄
• Maintains workflow continuity during equipment downtime 🏭
• Adjusts task priorities based on system conditions 📊
• Preserves operational stability under changing workloads ⚙️
Step 8: Operational Impact of Real-Time Task Allocation 📈
• Improves overall system throughput 🚀
• Reduces robot idle time and travel inefficiencies 🤖
• Minimizes conveyor bottlenecks 🚧
• Enhances responsiveness to changing workloads 🔄
Conclusion
Real-time robot task allocation plays a central role in modern conveyor-based automation systems. By combining live operational data, intelligent scheduling, and adaptive coordination, these systems ensure that robotic resources are used efficiently while maintaining continuous material flow. As industrial automation becomes more complex, real-time allocation mechanisms will remain essential for achieving scalable, high-performance conveyor networks.
See more blogs
You can all the articles below